© 2026 비디오맨 | 연락하다: info@videoman.gr | 개인 정보 정책 | 이용 약관
플레이어로드 ...
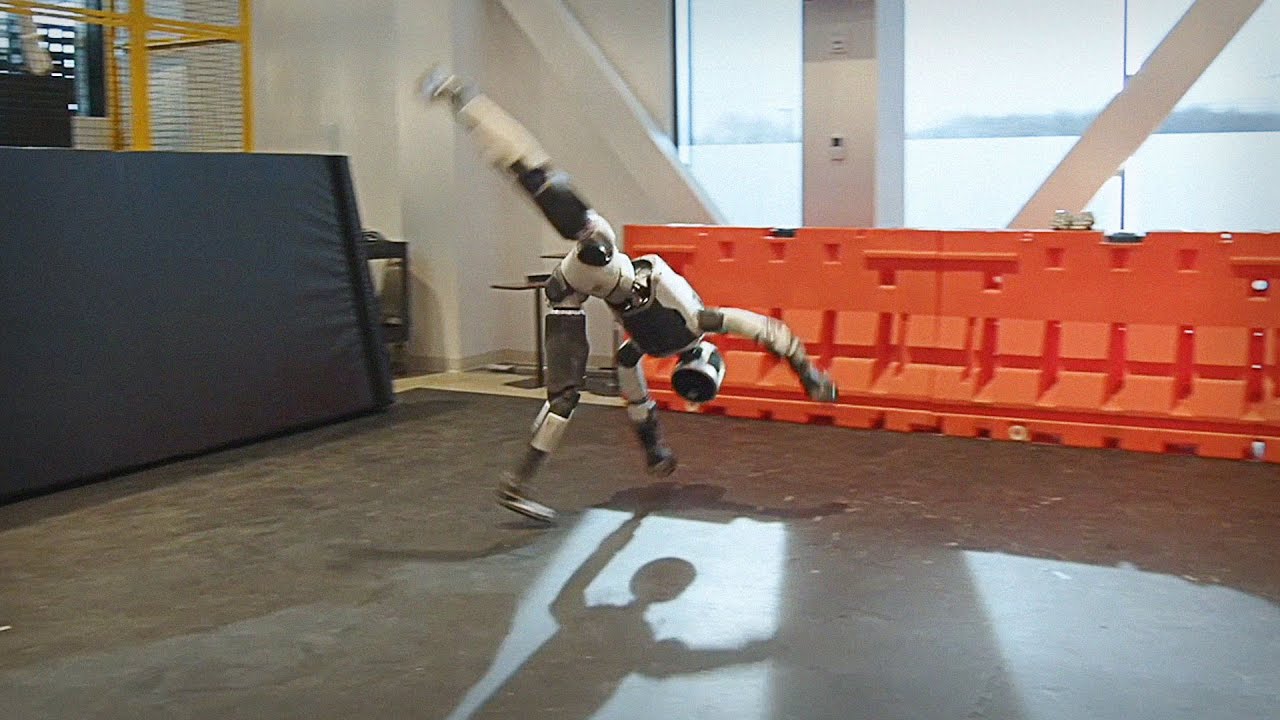
보스턴 다이내믹스의 새로운 인상적인 로봇

 ((19)) | 2017년 2월 28일 |
((19)) | 2017년 2월 28일 | 미국 회사 보스턴 다이내믹스는 핸들 이름으로 새로운 로봇을 선물한다. 높이 약 2 미터, 그것은 속도 14km / 시간에 이동할 수 있으며, 수직 점프를 만들기 위해 1,2m. 10 점 합작으로, 이것은 회사의 이전 두 다리 또는 4 개 달린 로봇보다 덜 복잡하고 뛰어난 유연성을 보여준다.
고급 관련 게시물